
Drive-Thru Vehicle Detection
DVD revolutionizes the drive-through order taking process experience at one of the largest global quick serve restaurant (QSR) chains. The module streamlines the ordering process for vehicles entering the QSRs drive-through lanes.

Anicca Contribution and Approach
Anicca partnered with a Fortune 500 QSR in supporting a vehicle detection initiative that utilized Anicca’s computer vision technology. Anicca facilitated the build of DVD software and science model at one of the largest global QSRs. The objective was to trigger a signal as soon as any vehicle enters the drive-through ordering system at the global QSR. The project involved mix of smart automation, state-of-the-art algorithms, synergy of IoT tools, and advanced computer vision with implementation and troubleshooting skills.
Deployment and Scope
DVD was operational at 100+ restaurant locations across the United States, with significant concentration in Chicago. The DVD system was built to scale for multiple restaurant locations.
Object Detection Model using Computer Vision
Powered by YOLO3, our Object Detection Model identifies a range of critical components within a vehicle, including heads, arms, steering wheels, and driver-side mirrors. This accurate and efficient model serves as the foundation for the DVD system.

Components of Success: Project Solution
The project solution comprises four key components to ensure flawless functioning of DVD.
The global QSR corporate supported in setting up of full-fledged DVD laboratory at Anicca Head office.
_edited.jpg)
Random Forest Classifier
Building upon the output of our Object Detection Model, the Random Forest Classifier employs intricate algorithms to determine the readiness of a customer's vehicle. The results are categorised as either "True" or "False," indicating the preparedness of the vehicle for ordering.
Image Classifier using Convolutional Neural Networks
As a reliable backup, our Image Classifier uses advanced neural networks to assess vehicle readiness. This ensures smooth operations if the Object Detection Model faces issues. Outputs like "Ready," "Almost Ready," and "Not Ready" are interpreted by the DVD rules engine.


DVD Rules Engine
At the heart of our system lies the DVD Rules Engine, which intelligently processes signals from both the Object Detection Model and the Image Classifier. Through a series of logical rules, this engine makes decisive judgments about a vehicle's readiness. The resulting insights are then seamlessly conveyed to the API broker for further actions.
Precision in Hardware Systems
Camera - Evolution for Clarity
Presently, DVD operations rely on IP cameras within participating stores. However, we're committed to continuous enhancement. Our future plans involve transitioning to high fidelity cameras, which offer superior performance, particularly in sun-glare situations. The enhanced image quality from high fidelity cameras promises a sharper view, ensuring seamless performance throughout.

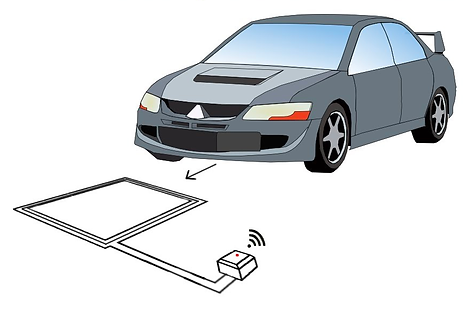
Metal Loop Detector - Capturing Presence
Integral to our system is the metal Loop Detector, featuring an inductive coil beneath drive-thru lanes. This component generates signals upon the arrival or departure of a substantial object. This mechanism reinforces our commitment to accuracy and efficiency.